이 로봇은 인서트 생산의 프레스 공정에 사용되어 인서트 피킹, 디버링, 계량 및 정기 배치 공정의 자동화를 실현합니다. 고객 요구 사항에 따라 효율적이고 안정적으로 작업을 완료할 수 있습니다.
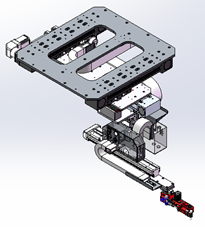
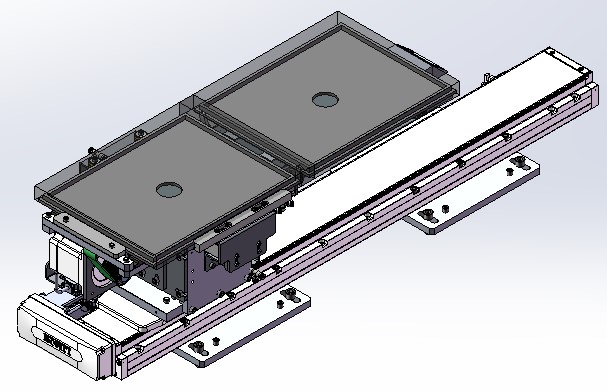
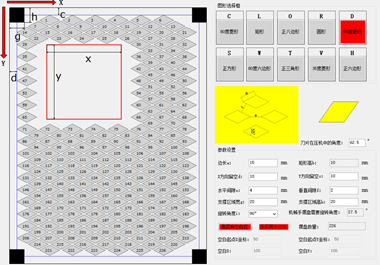
모션 모듈 레이아웃: 모션 모듈 레이아웃
각 기능 부품의 동작 궤적을 세심하게 계획하고 모듈 구조를 합리적으로 배치하여 전체 레이아웃이 최고의 그립 효율과 안정성을 충족합니다.
로봇의 고강성 프레임과 대리석 카운터웨이트는 고속 이동 시 로봇의 안정성을 보장하기 위해 사용됩니다.
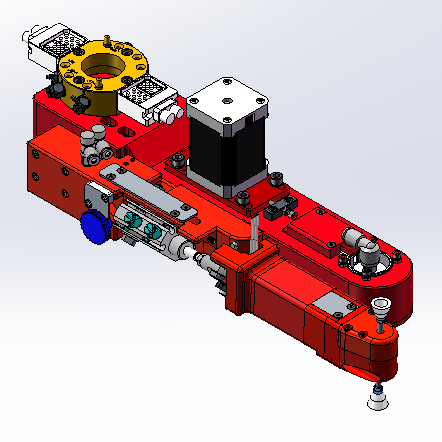
그립 암
퀵 체인지 메커니즘은 재료 선택 툴링과 청소 툴링 사이를 쉽게 전환할 수 있어 인서트 생산의 안정성을 향상시킵니다.
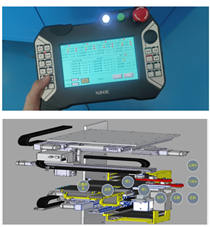
퀵 체인지 툴링 시스템을 채택하여 로봇 엔드 이펙터를 빠르게 전환할 수 있습니다.
인서트의 회전 및 각도 변화를 구현하기 위해 스테퍼 모터가 선택됩니다.
툴링의 종류: SMC 클램핑 죠, 내부 홀 지지대, SMC 진공 흡입, 금형에 남아있는 고착 분말을 제거하기 위한 브러시 등.
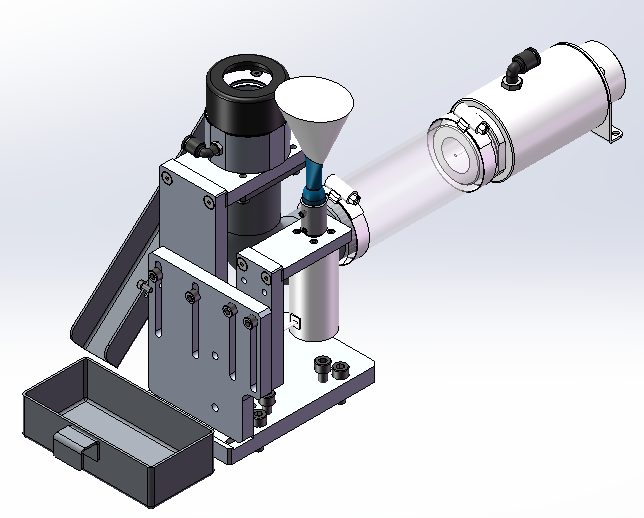
펀치 청소
프레스 펀치를 다양한 방법으로 청소하여 프레스가 항상 양호한 작동 상태를 유지하도록 합니다.
로봇이 모든 기능을 완료하면 인서트 프레싱의 최대 생산 속도는 최소 분당 최대 10개에 달할 수 있습니다.
디버링
브러시는 인서트 하단의 버를 청소합니다.
인서트 상단의 에어젯으로 버를 청소합니다.
먼지 회수 장치
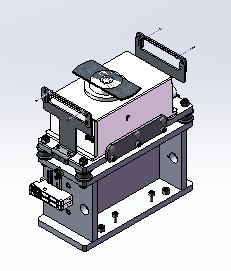
저울 / 계량
일본 AND 또는 오하우스의 초정밀 전자 저울을 채택하여 +/-0.001g의 정확도를 자랑합니다. 각 인서트의 무게를 정밀하게 검사하고 측정 결과에 따라 부적합한 무게를 가진 제품을 제거할 수 있으며, 동시에 데이터는 프레스로 전송됩니다. 프레스는 실시간으로 프레스 파라미터를 조정하여 생산 안정성을 향상시킬 수 있습니다.
듀얼 저울은 생산 효율성을 높이기 위한 옵션입니다.
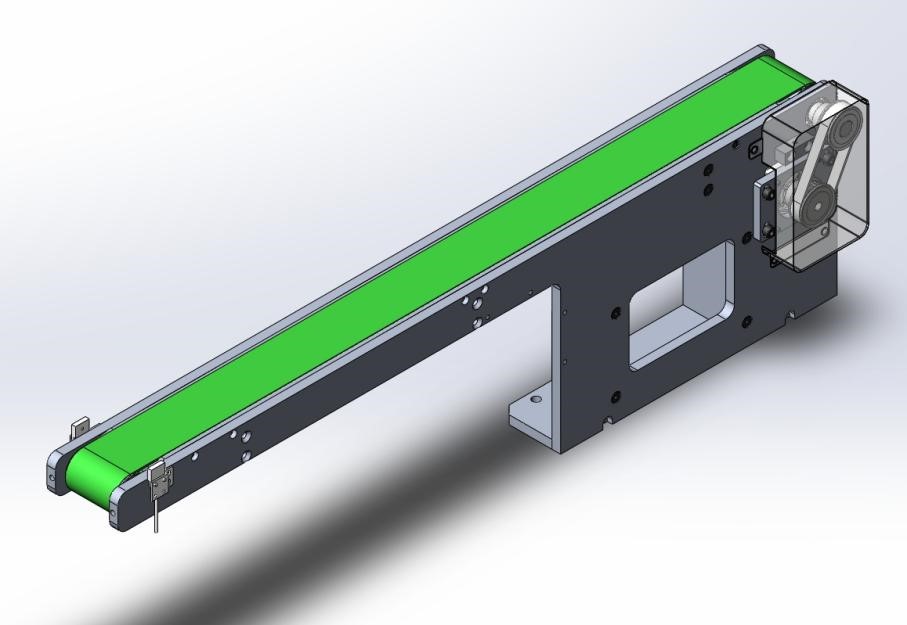
샘플 컨베이어 삽입
플랫 벨트 컨베이어를 사용하여 샘플 인서트를 운반합니다.
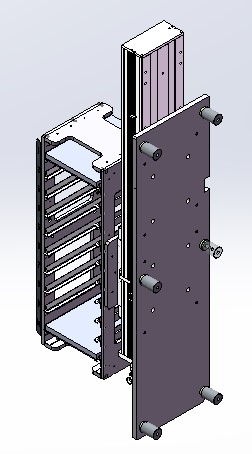
소결 트레이
단일 레이어 컨베이어는 대량 생산에서 무인 생산의 요구 사항을 충족할 수 있습니다.
8-10 개의 재료 트레이 매거진이 장착되어있어 대규모 생산에서 무인 생산 요구 사항을 충족 할 수 있습니다.