Робот используется в процессе прессования при производстве вкладышей, осуществляя автоматизацию процесса подбора вкладышей, удаления заусенцев, взвешивания и регулярного размещения. Он может эффективно и стабильно выполнять работу в соответствии с требованиями заказчика.
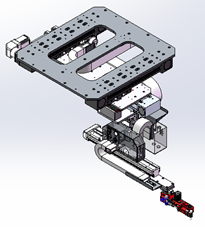
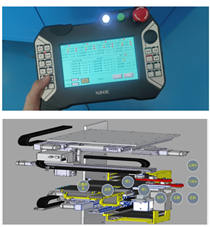
Расположение модуля движения:
Траектория движения каждой функциональной части тщательно продумана, а структура модулей разумно организована, так что общая компоновка отвечает самым высоким требованиям к эффективности и стабильности захвата.
Высокая жесткость рамы робота и мраморный противовес обеспечивают устойчивость робота во время высокоскоростного движения.
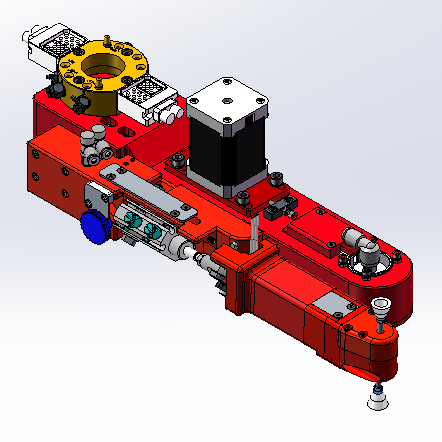
Захватный рычаг
Быстросменный механизм позволяет легко переключаться между оснасткой для отбора материала и очистительной оснасткой, что повышает стабильность производства пластин.
Применяется система быстросменной оснастки для быстрой смены роботизированного концевого инструмента.
Для осуществления вращения и изменения угла наклона вставки выбран шаговый двигатель.
Типы оснастки: Зажимные губки SMC, поддержка внутреннего отверстия, вакуумный отсос SMC, щетка для удаления остатков прилипшего порошка на пресс-форме и т.д.
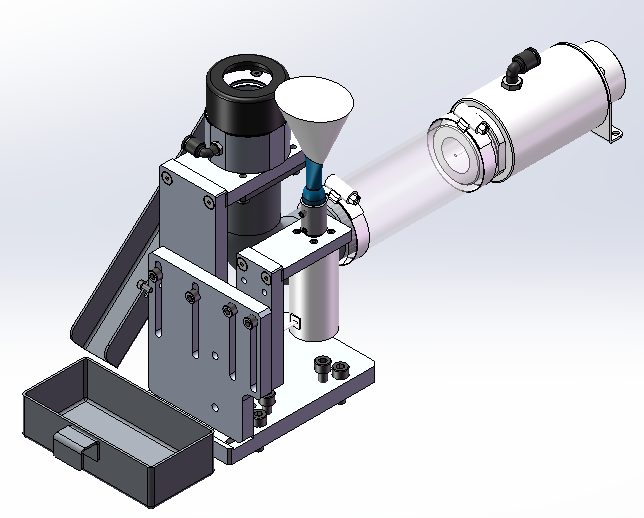
Очистка пуансонов
Очищайте пуансон пресса различными способами, чтобы обеспечить его постоянное рабочее состояние.
Когда робот выполняет все функции, максимальная скорость прессования вкладышей может достигать 10 шт/мин.
Удаление заусенцев
Щетка очищает заусенцы в нижней части вставки.
Очистите заусенцы с помощью воздушной струи в верхней части вставки.
Пылеулавливающий агрегат
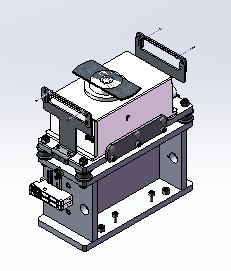
Баланс / Взвешивание
Используются сверхточные электронные весы японской фирмы AND или Ohaus с точностью +/-0,001 г. Вес каждого вкладыша может быть точно проверен, а изделия с неквалифицированным весом могут быть удалены по результатам измерений, при этом данные будут переданы на пресс. Пресс может регулировать параметры прессования в режиме реального времени для повышения стабильности производства.
Двойное равновесие является опцией для повышения эффективности производства.
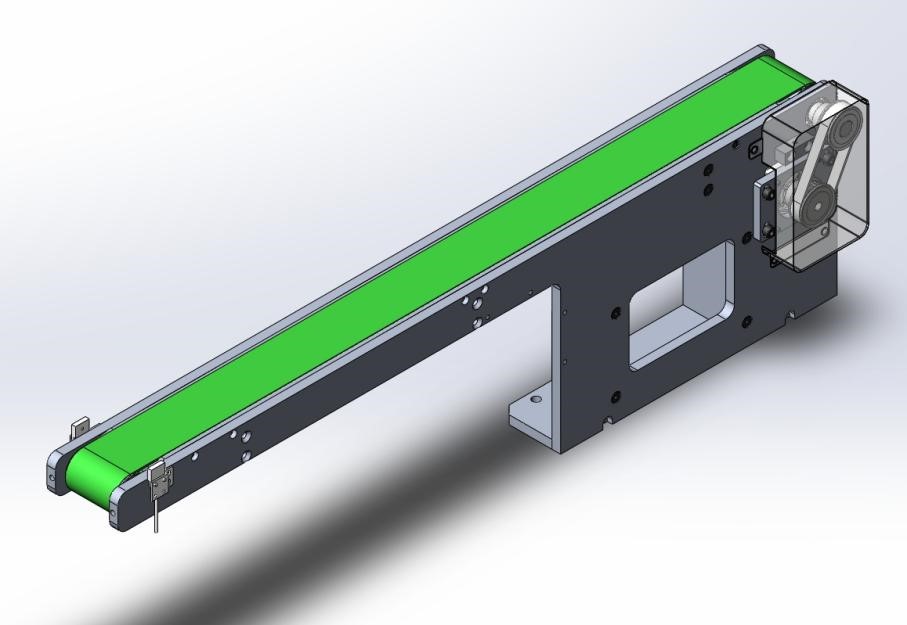
Конвейер для вставки образцов
Для транспортировки вставок с образцами используйте плоский ленточный конвейер.
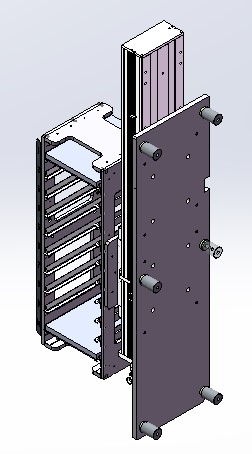
Лоток для спекания
Однослойный конвейер может отвечать требованиям безлюдного производства в массовом производстве.
Он оснащен 8-10 магазинами для лотков с материалами, что позволяет удовлетворить требования беспилотного производства в крупномасштабном производстве.
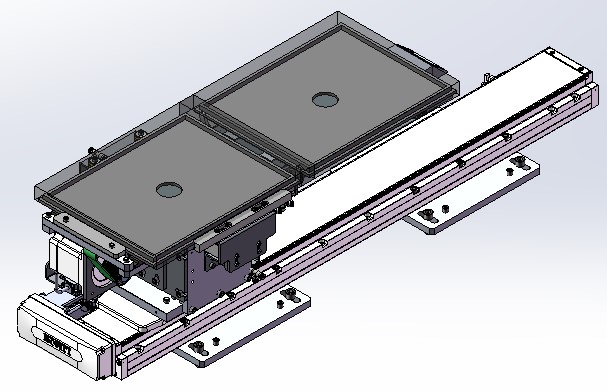
Транспортировочная графитовая лодка
Используются высокоскоростные и высокоточные модули, позволяющие точно реализовать последовательное размещение вставок и укладку графитовых лодок.
Графитовая лодка подается на позицию штабелирования плоским ленточным конвейером.
Для центрирования графитовой лодки используется пневматический цилиндр.
Модуль приводится в действие серводвигателем, а графитовая лодка подается ленточным конвейером, который приводится в действие шаговым двигателем.
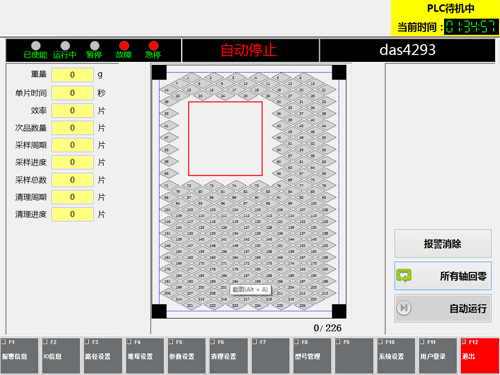
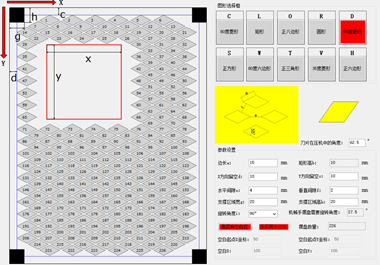
Простое управление
Обновление данных о размещении в режиме реального времени, цветовое (красное) заполнение размещенных вставок может быть выполнено в компьютерной системе в соответствии с фактическим ходом размещения, имитируя размещение на месте
Можно настроить и смоделировать параметры размещения популярных типов вставок. Итоговые параметры можно сохранить, чтобы в следующий раз легко использовать их при изготовлении подобных вставок.
Область на графитовой лодке, на которой не нужно размещать вставки, может быть разделена для использования в тестовых экспериментах.
Перенастройка координат, когда необходимо перенастроить координаты, просто выберите соответствующую кнопку, остановите работу, когда робот переместится в новое положение. В это время с помощью обучающего кулона можно выполнить тонкую настройку движения робота и сохранить необходимые значения координат.
Приложение
Робот TRUER полностью совместим со следующими прессами!