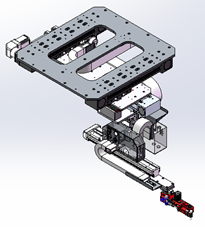
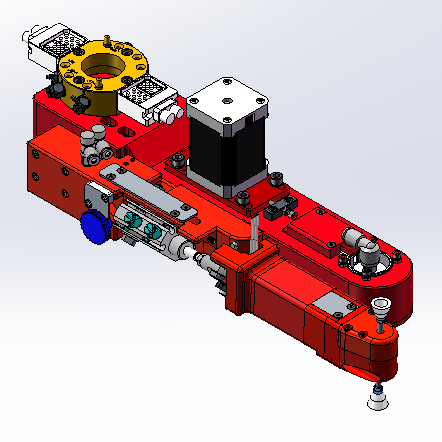
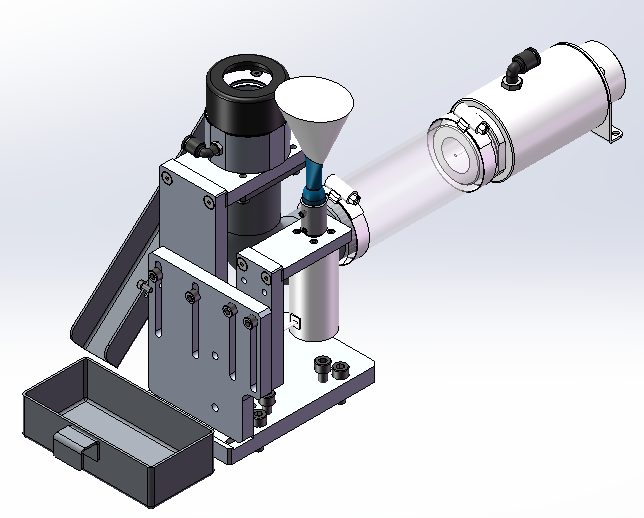
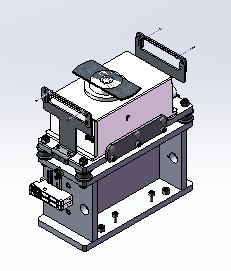
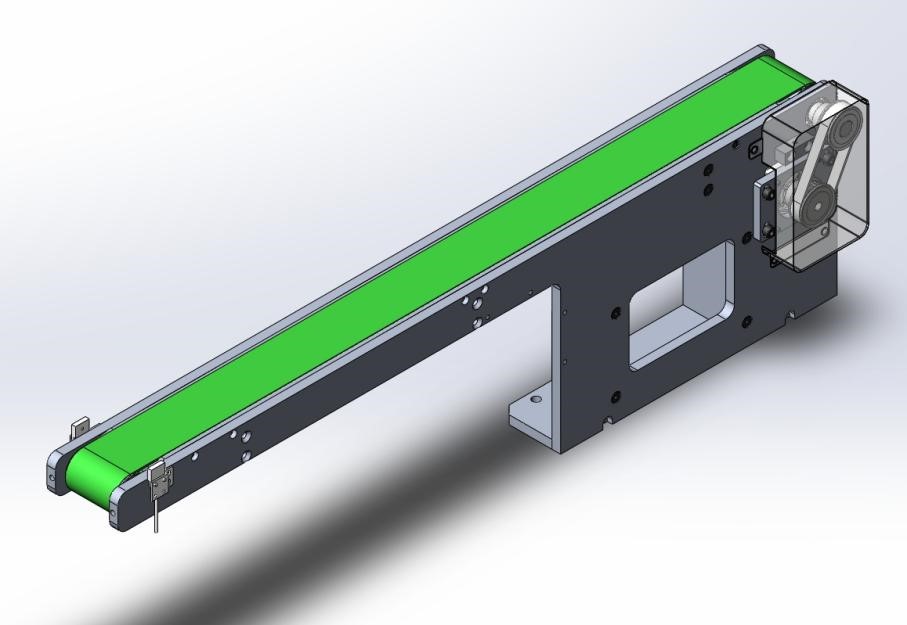
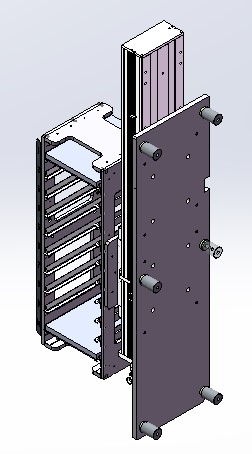
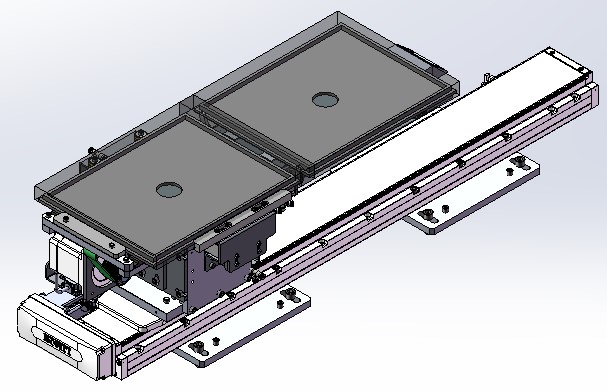
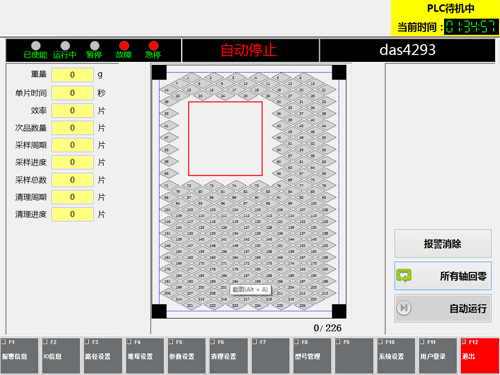
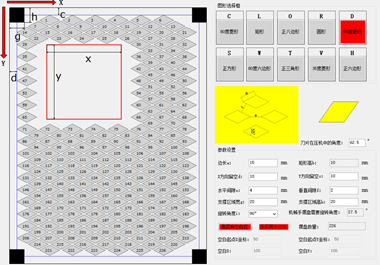
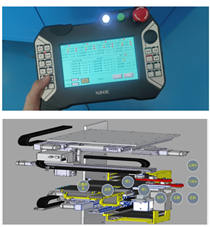
プレス機用ロボット このロボットはインサート製造のプレス工程で使用され、インサートのピッキング、バリ取り、計量、定置工程の自動化を実現します。顧客の要求に応じて、効率的かつ安定的に作業を完了することができます。. モーションモジュールのレイアウト 各機能部品の運動軌道は入念に計画され、モジュール構造は合理的に配置されているため、全体的なレイアウトは最高のグラブ効率と安定性を満たしている。. ロボットの高剛性フレームと大理石のカウンターウェイトにより、高速移動時の安定性を確保している。.グリップアーム クイックチェンジ機構は、材料ピッキング工具とクリーニング工具を簡単に切り替えることができ、インサート製造の安定性を向上させます。. クイックチェンジツーリングシステムを採用し、ロボットのエンドエフェクタを素早く切り替えることができます。. ステッピングモーターは、インサートの回転と角度変更を実現するために選択される。. 工具の種類SMCクランプジョー、インナーホールサポート、SMCバキュームサクション、金型残留付着粉除去用ブラシ等。.パンチクリーニング プレスが常に良好な状態で作動するよう、プレスパンチをさまざまな方法で清掃する。. ロボットがすべての機能を完了すると、インサート圧入の最高生産速度は最小で10個/分に達することができる。.デバリング ブラシはインサートの底にあるバリを掃除する。.チップ上部のエアジェットでバリを清掃する。. 粉塵回収装置バランス/計量 日本ANDまたはOhausの超精密電子天秤を採用し、精度は±0.001gです。各インサートの重量を正確に検査することができ、測定結果に応じて不適格な重量の製品を除去することができ、その間、データはプレス機に送信されます。プレス機はリアルタイムでプレスパラメーターを調整し、生産の安定性を向上させることができます。. 生産効率を向上させるため、デュアル天秤はオプションである。. インサートサンプルコンベア サンプルインサートの搬送には平ベルトコンベアを使用する。.焼結トレイ 単層コンベヤは、大量生産における無人生産の要件を満たすことができます。. 8-10個の材料トレイマガジンを装備しており、大規模生産における無人生産の要求を満たすことができる。.運搬用グラファイトボート 高速・高精度のモジュールを採用し、グラファイトボートのインサートとスタックの連続配置を正確に実現。.グラファイトボートは、平ベルトコンベアによって積み重ね位置まで運ばれる。. グラファイトボートのセンタリング位置決めにエアシリンダーを採用。.モジュールはサーボモーターで駆動され、グラファイトボートはステッピングモーターで駆動されるベルトコンベアで搬送される。.簡単な操作 リアルタイムで配置データを更新し、配置されたインサートの色(赤)塗りつぶしは、実際の配置の進捗状況に応じてコンピュータシステムで実行され、現場での配置をシミュレートすることができます。 一般的なインサートの配置パラメータを設定し、シミュレーションすることができます。最終的なパラメータは保存することができ、次回同様のインサートを製作する際に簡単に呼び出すことができます。.グラファイトボート上の、インサートを配置する必要のない領域は、試験実験に使用するために分割することができる。. 座標の再調整、座標の再調整が必要な時、ただ対応するボタンを選択し、ロボットが新しい位置に移動する時、運転を停止する。この時、ティーチングペンダントでロボットの動きの微調整を行い、必要な座標値を保存することができる。.申し込み TRUERロボットは以下のプレス機械に完全対応しています!