Robot pour machine de presse

Le robot est utilisé dans le processus de pressage de la production d'inserts, réalisant l'automatisation du processus de prélèvement, d'ébavurage, de pesage et de placement régulier des inserts. Il peut effectuer le travail de manière efficace et stable, conformément aux exigences du client.
Disposition du module de mouvement:
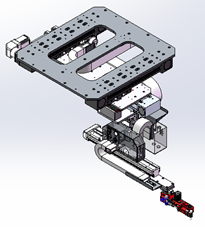
La trajectoire de mouvement de chaque partie fonctionnelle est soigneusement planifiée et la structure du module est raisonnablement arrangée, de sorte que l'agencement global réponde aux exigences les plus élevées en matière d'efficacité et de stabilité.
Le cadre très rigide du robot et le contrepoids en marbre sont utilisés pour assurer la stabilité du robot pendant les mouvements à grande vitesse.
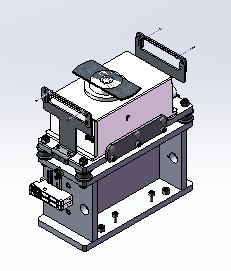
Bras de préhension
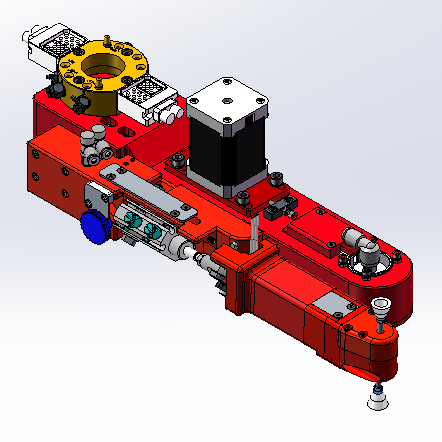
Le mécanisme de changement rapide permet de passer facilement de l'outil de prélèvement du matériau à l'outil de nettoyage, ce qui améliore la stabilité de la production d'inserts.
Adopter un système d'outillage à changement rapide pour changer rapidement d'effecteur robotique.
Le moteur pas à pas est sélectionné pour réaliser la rotation et le changement d'angle de l'insert.
Types d'outils : Mâchoire de serrage SMC, support de trou intérieur, aspiration SMC, brosse pour l'élimination des résidus de poudre collante sur le moule, etc.
Nettoyage des poinçons
Nettoyez le poinçon de la presse de différentes manières afin de vous assurer que la presse est toujours en bon état de fonctionnement.
Lorsque le robot remplit toutes les fonctions, la vitesse de production maximale du pressage d'inserts peut atteindre 10 pièces/minute au minimum.
Ébavurage
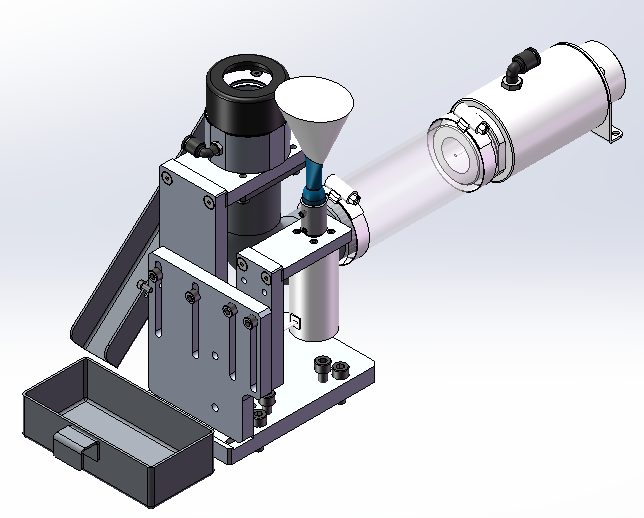
La brosse nettoie les bavures au fond de l'insert.
Nettoyez les bavures à l'aide du jet d'air situé en haut de la plaquette.
Unité de récupération des poussières
Balance / Pesée
La balance électronique ultra-précise du Japon AND ou Ohaus est adoptée, avec une précision de +/-0,001g. Le poids de chaque insert peut être contrôlé avec précision et les produits dont le poids n'est pas qualifié peuvent être retirés en fonction des résultats de la mesure, tandis que les données sont transmises à la presse. La presse peut ajuster les paramètres de pressage en temps réel pour améliorer la stabilité de la production.
La double balance est optionnelle pour améliorer l'efficacité de la production.
Insérer le convoyeur d'échantillons
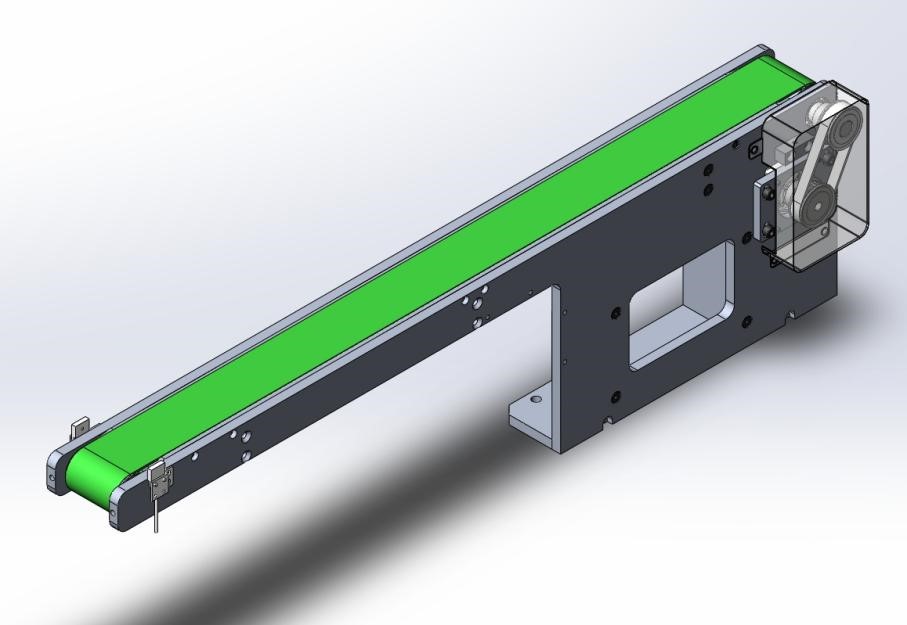
Utiliser un convoyeur à bande plate pour transporter les inserts d'échantillonnage.
Plateau de frittage
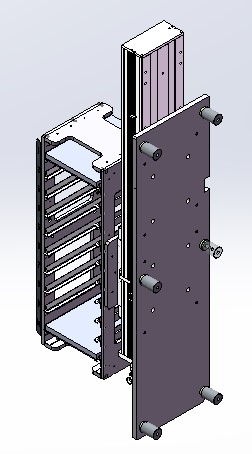
Le convoyeur à couche unique peut répondre aux exigences de la production de masse sans personnel.
Il est équipé de 8 à 10 magasins à plateaux, ce qui permet de répondre aux exigences de la production sans personnel dans le cadre d'une production à grande échelle.
Bateau de transport de graphite
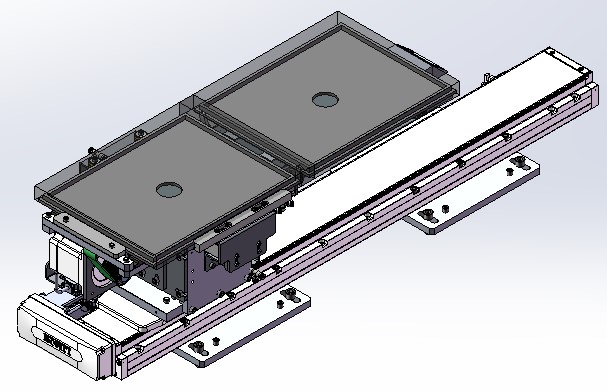
L'adoption de modules à grande vitesse et à haute précision permet de réaliser avec précision le placement séquentiel des inserts et l'empilage des bateaux en graphite.
Le bateau de graphite est acheminé vers la position d'empilage par un convoyeur à bande plate.
Adopte un cylindre pneumatique pour le positionnement du centrage du bateau en graphite.
Le module est entraîné par un servomoteur et le bateau de graphite est transporté par un convoyeur à bande entraîné par un moteur pas à pas.
Facilité d'utilisation
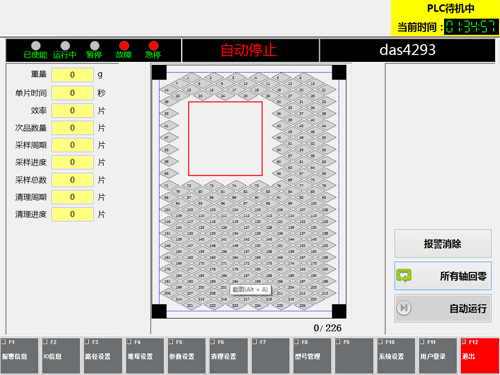
Mise à jour des données de placement en temps réel, le remplissage en couleur (rouge) des inserts qui ont été placés peut être effectué dans le système informatique en fonction de l'avancement réel du placement, simulant ainsi le placement sur site.
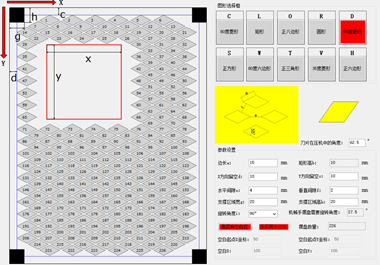
Les paramètres de placement des types d'inserts les plus courants peuvent être configurés et simulés. Les paramètres finaux peuvent être sauvegardés pour être facilement invoqués lors de la production d'inserts similaires la prochaine fois.
La zone du bateau en graphite qui n'a pas besoin d'être placée avec des inserts peut être divisée pour être utilisée dans des expériences de test.
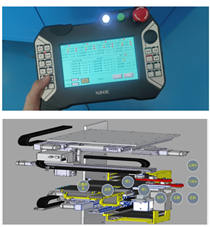
Réajustement des coordonnées : lorsqu'il est nécessaire de réajuster les coordonnées, il suffit de sélectionner le bouton correspondant et d'arrêter le fonctionnement lorsque le robot se déplace vers la nouvelle position. À ce moment-là, le pendentif d'apprentissage peut effectuer le réglage fin du mouvement du robot et les valeurs de coordonnées requises peuvent être sauvegardées.
Application

Le robot TRUER est entièrement compatible avec la machine de presse suivante !